2.4 KiB
Running AutowareV2X in the Planning Simulator
Simulations can be an easy way of verifying the functionality of AutowareV2X before an actual field test. We will use Autoware's Planning Simulator here and add connectivity to it with AutowareV2X.
!!! Note Make sure you have completed Autoware's Planning Simulator Tutorial before continuing.
Here, since we want to test both the sending and receiving of information through AutowareV2X, we will need at least two AutowareV2X instances. For this, we will use a Docker-based environment.
The Docker environment to create
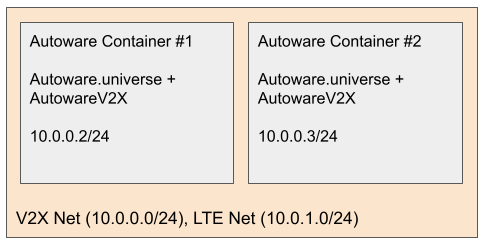
We will be creating the Docker environment as depicted in the figure below. There will be two Docker containers, each of which includes Autoware.universe and AutowareV2X. They will both be a part of the Docker network called v2x_net with the subnet 10.0.0.0/24.
Create a Docker network for V2X communication
docker network create --driver=bridge --subnet=10.0.0.0/24 v2x_net -o com.docker.network.bridge.name="v2x_net"
Launch two Autoware containers
# In one terminal, use rocker to launch container "autoware_1"
rocker --nvidia --x11 --user --volume $HOME/autoware_docker --volume $HOME/autoware_map --network=v2x_net --ip 10.0.0.2 --name autoware_1 --hostname autoware_1 -- ghcr.io/autowarefoundation/autoware-universe:latest-cuda
# In another terminal, use rocker to launch container "autoware_2"
rocker --nvidia --x11 --user --volume $HOME/autoware_docker --volume $HOME/autoware_map --network=v2x_net --ip 10.0.0.3 --name autoware_2 --hostname autoware_2 -- ghcr.io/autowarefoundation/autoware-universe:latest-cuda
Run Planning Simulator
Run the Planning Simulator in both autoware_1 and autoware_2.
source ~/autoware_docker/install/setup.bash
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
Run AutowareV2X
In another terminal, connect to the autoware_1 and autoware_2 containers, and start AutowareV2X in both of them.
source ~/autoware_docker/install/setup.bash
ros2 launch autoware_v2x v2x.launch.xml network_interface:=eth1