790 B
790 B
Recording Rosbag and Tcpdump for Analysis
Record both rosbag and tcpdump
In autoware_1:
docker exec -it autoware_1 bash
cd ~/workspace/autoware_docker
ros2 bag record -o test_sender_rosbag /perception/object_recognition/objects /tf
sudo apt update
sudo apt install tcpdump
sudo tcpdump -i eth0 -w test_sender_tcpdump.pcap
In autoware_2:
docker exec -it autoware_2 bash
cd ~/workspace/autoware_docker
ros2 bag record -o test_receiver_rosbag /v2x/cpm/objects /tf
sudo apt update
sudo apt install tcpdump
sudo tcpdump -i eth0 -w test_receiver_tcpdump.pcap
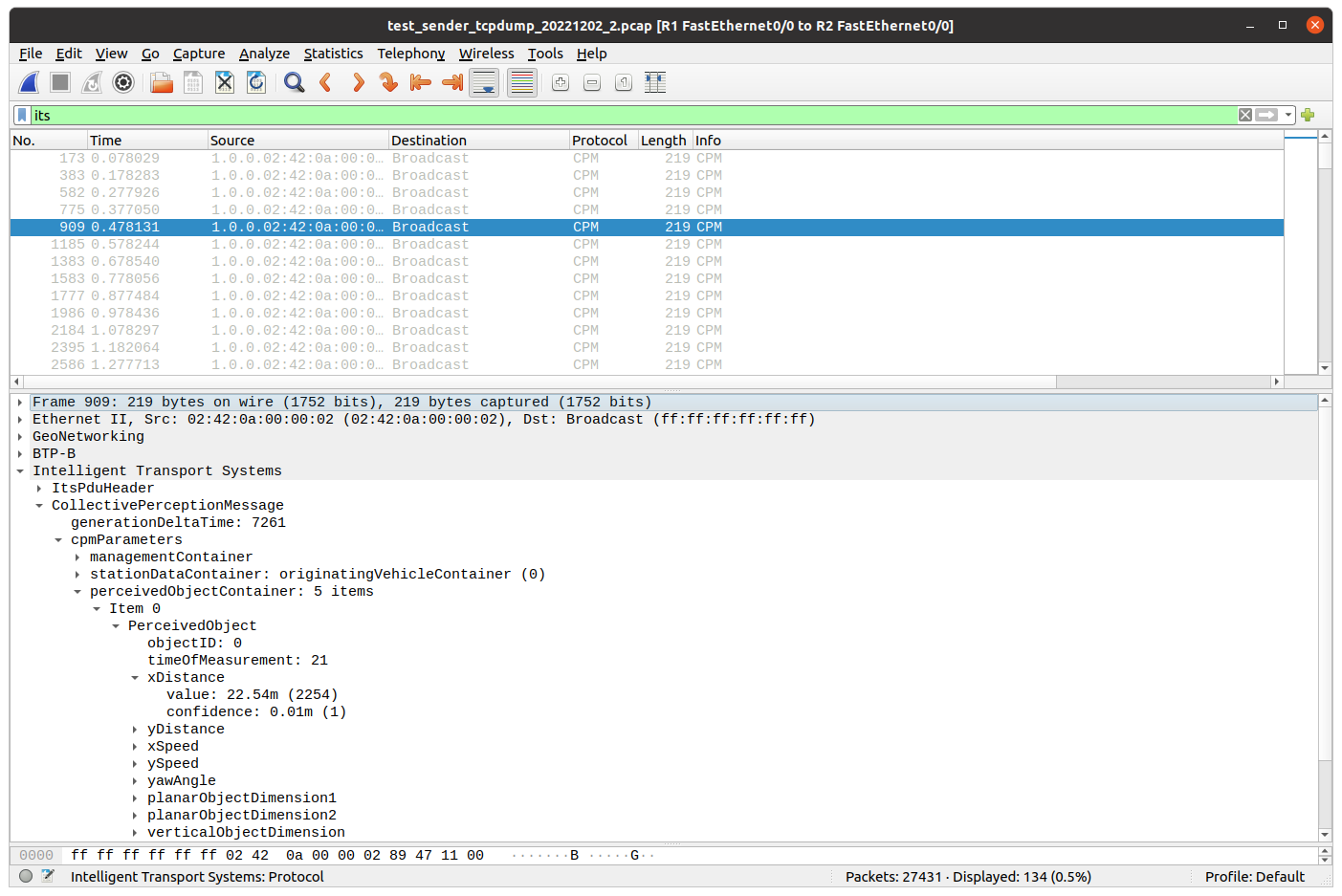
Open PCAP file in Wireshark
Analyze in JupyteLab
Plot the x,y coordinates of objects in test_sender_rosbag
- Export the necessary topics of the Rosbag to a CSV file